
UcoSLAM
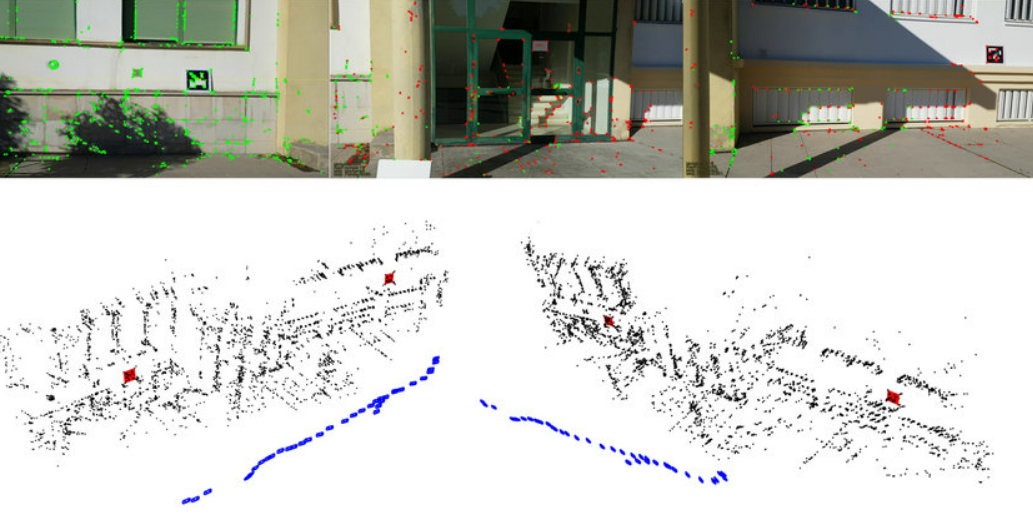
UcoSLAM is a library for Simultaneous Localization and Mapping using keypoints that able to operate with monocular cameras, stereo cameras, rgbd cameras. Additionally, our library is fully integrated with the ArUco library for detecting squared fiducial markers. They can be placed in the environment to improve tracking. UcoSLAM is an step forward keypoint-based SLAM methods such as ORBSLAM2.
Main Features
The main features of UcoSLAM are:
Real-time SLAM in cpu using monocular, stereo and RGBD cameras.
- Ability to save/load maps generated.
- Ability to use markers to enhance, initialization, tracking, and long-term relocalization. Also, markers allow estimating the real map scale from monocular cameras. It is integrated with the ArUco library.
- Robust relocalization in repetitive areas (corridors, buildings) using markers.
- Support for sequential mapping, ensuring no frames are dropped in the process. Also, the sequential mode guarantees a deterministic behavior. In other words, processing the same video sequence twice produces the same results.
- Our parallelized KeyPoint detector makes the tracking much faster that other approaches
- Only one external dependency, OpenCV. The rest of the required packages are in the library. The compilation is straightforward.
- Multiplatform, ready to be compiled in Windows, Linux and Android systems
- An easy-to-use graphical user interface to process your videos, save and visualize your maps, calibrating your camera, etc.
- PPA repository for Ubuntu and ready-to-use packages for Windows. You do not need to be a developer to use it.
- Good documentation and Video Tutorials
Download
The source and precompiled binaries for Windows can be downloaded in https://sourceforge.net/projects/ucoslam/.
For Ubuntu users, you can add the ucoslam PPA repository which has the library and its headers, and also the graphical user interface program UcoSLAM_GUI
The source and precompiled binaries for Windows can be downloaded in https://sourceforge.net/projects/ucoslam/.
For Ubuntu users, you can add the ucoslam PPA repository which has the library and its headers, and also the graphical user interface program UcoSLAM_GUI
The meta-dataset employed for testing can be obtained at MEGA.
Documentation
Check outr youtube tutorials and manual
Citing
If you use this work please cite:
@article{MUNOZSALINAS2020107193,
title = "UcoSLAM: Simultaneous Localization and Mapping by Fusion of KeyPoints and Squared Planar Markers",
journal = "Pattern Recognition",
pages = "107193",
year = "2020",
issn = "0031-3203",
author = "Rafael Muñoz-Salinas and R. Medina-Carnicer",
}
@article{MUNOZSALINAS2020107193,
title = "UcoSLAM: Simultaneous Localization and Mapping by Fusion of KeyPoints and Squared Planar Markers",
journal = "Pattern Recognition",
pages = "107193",
year = "2020",
issn = "0031-3203",
author = "Rafael Muñoz-Salinas and R. Medina-Carnicer",
}
The original published version can be obtained here. And a free version of the paper can be obtained here.
Volume 86, 2019, Pages 156-171.
License
UcoSLAM is released under GPLv3 license (see License-gpl.txt).
Please see Dependencies.md for a list of all included code and library dependencies which are not property of the authors of UcoSLAM.
For a closed-source version of UcoSLAM for commercial purposes, please contact rmsalinas@uco.es
Related Projects
NOTE:
While the monocular method has been scientifically tested and compared againts ORBSLAM and LDSO (obtaining better resuts) the Stereo, and RGBD method have not been tested yet. Thus, the performance of these methods can be not guaranteed yet.