
Fractal Markers
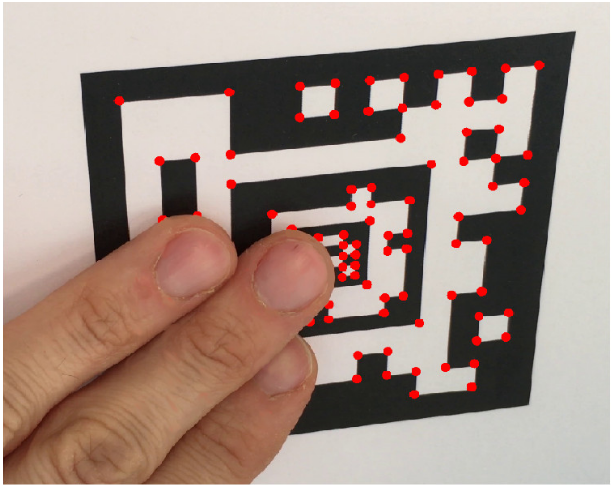
Fractal markers are a new concept of marker, which is composed of several fiducial square markers of different size inside. Unlike traditional fiducial markers, the structure of this marker can be detected from a large number of distances, as well as solve problems of partial or total occlusion of the marker.
The features of this marker, together with the tools developed make it a powerful tool for camera pose estimation in a large number of applications such as robots, unmanned vehicles and augmented reality.
Fractal Marker is integrated inside ArUco’s libraries, allowing a fast, robust and precise detection of the markers. ArUco is a widely used OpenSource library for detecting squared fiducial.
Download
The library can be downloaded at SourceForge
Documentation
Very detailed documentation can be obtained HERE
Citing
If you use this library in your research, you must cite:
- «Fractal Markers: a new approach for long-range camera pose estimation under occlusion», Francisco J. Romero-Ramirez, Rafael Muñoz-Salinas, Rafael Medina-Carnicer, in IEEE Access, vol. 7, pp. 169908-169919, 2019
- 1. Main Aruco Paper»Speeded up detection of squared fiducial markers», Francisco J.Romero-Ramirez, Rafael Muñoz-Salinas, Rafael Medina-Carnicer, Image and Vision Computing, vol 76, pages 38-47, year 201
- «Speeded up detection of squared fiducial markers», Francisco J. Romero-Ramirez, Rafael Muñoz-Salinas, Rafael Medina-Carnicer, Image and Vision Computing, vol 76, pages 38-47, year 2018
- «Generation of fiducial marker dictionaries using mixed integer linear programming»,S. Garrido-Jurado, R. Muñoz Salinas, F.J. Madrid-Cuevas, R. Medina-Carnicer, Pattern Recognition:51, 481-491,2016
License
This software is licensed under GPLv3 license for personal, research and educational purposes.
Contact
If you have any further question, please contact fj.romero[at]uco[dot]es
Related Projects
Aruco, Marker Mapper, SPM-SLAM, and UcoSLAM